| Summary |
| Obtaining models of dynamic 3D objects is an important part of content generation for computer graphics. If the states or poses of the dynamic object repeat often during a sequence (but not necessarily periodically), we call such a repetitive motion. Our key observation is that for repetitive motions we can use one fixed camera to perform robust motion analysis and a second capture-device to provide 3D information of each motion state. After the motion sequence, we group temporally disjoint observations of the same motion state and produce a smooth space-time reconstruction of the scene. Effectively, the dynamic scene modeling problem is converted to a series of static scene reconstructions, which are much easier to tackle. |
 |
| Multiple-Viewpoint Modeling |
| To passively obtain a multiple-viewpoint model of repetitive motions, we combine the motion analysis benefits provided by a static camera with the object reconstruction ability of one or more moving cameras observing a static scene, together yielding an efficient capture system using as few as two cameras. Our approach allows us to model dynamic objects without the costs and limitations of large and static multi-camera acquisition systems and without having to tackle correspondence establishment of a moving camera seeing a moving scene. |
 |
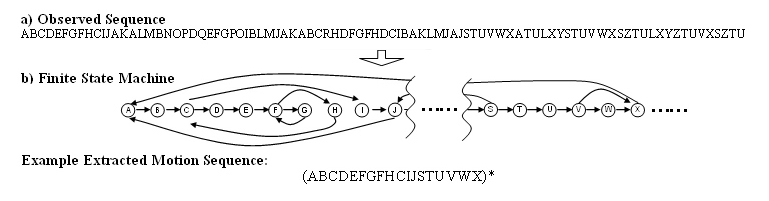
| Our approach proceeds in two phases. In a brief preprocessing phase, the static camera observes the dynamic object and determines a sequence of M states of the repetitive motion. Subsequently during a real-time capture phase, the images from the static camera are classified to one of the previously determined M states and the moving camera, synchronized to the static camera, simultaneously captures the state from different viewpoints. Once each state is sampled from a sufficient number of viewpoints, acquisition is complete. We then perform a reconstruction of each state of the acquired object. |
 |
| Structured-Light Acquisition |
| To actively obtain a dense geometry and color model of repetitive motions, we replace the second capture-device with a digital projector. Active structured light methods that require one-frame are easily suitable for ranging dynamic scenes. However, only limited reconstruction density can be achieved by using a single pattern. If temporally disjoint images capturing the same motion state but under different structured light illumination patterns can be corresponded together, time-multiplexed codes can be used to acquire high density depth samples. Furthermore, if the state of the moving scene can also be matched against fully-illuminated images, the color and texture of the moving scene can be recovered as well. Our approach uses a geometrically and spectrally calibrated camera-projector pair to capture a scene containing repetitive motions. |
 |
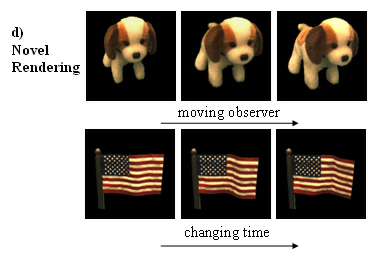
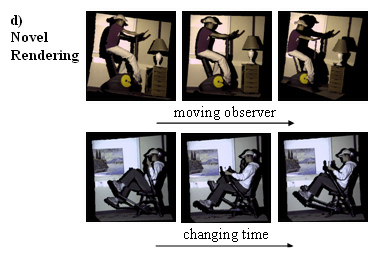
| For acquisition, an all white image and a set of two-color Gray-code patterns are sequentially projected onto the scene. Image analysis is performed to find a set of motion-state images under white illumination that generate a smoothly changing and repeating image sequence and that can be well-matched against the two-color structured-light illuminated images. Matching is done using an image differencing operator that is calibrated to work with different colored light sources. Since the observed motion tends to repeat, many desired motion states are eventually sampled by all patterns, yielding the ability to reconstruct motion states individually. The collection of reconstructed motion states can then be used to re-create a scene similar to the original or to produce new motion sequences. |
 |

|




